研究内容介绍
鉴于深海资源开发技术的重大意义,中国科学院深海科学与工程研究所于2014年成立了深海资源开发技术研究室,围绕国家海洋战略需求,开展深海矿藏资源(包括油气、天然气水合物及多金属矿产资源)的探测与开采技术、深海地质工程评价等方面研究并研制深海资源探测和地质勘查装备。研究室由我国著名的深海矿产资源领域专家阳宁创立,已建成包括一名美籍专家(来自美国伍兹霍尔海洋研究所)在内的研究团队。研究室目前共有研究员/正高级工程师4名,高级工程师3名,工程师及助理工程师15名,研究生9名。研究室承担了多项中科院先导专项、中科院重点部署项目、知识创新工程领域前沿项目、海南省重大科技项目及国家重点研发计划的研究课题,已研制成功具有自主知识产权的深海浮游式移动作业系统、深海底爬行式移动作业系统、深海底工程地质原位测试装置、深海底钴结壳规模化取样装置以及深海多功能抓斗等。
研究成果介绍
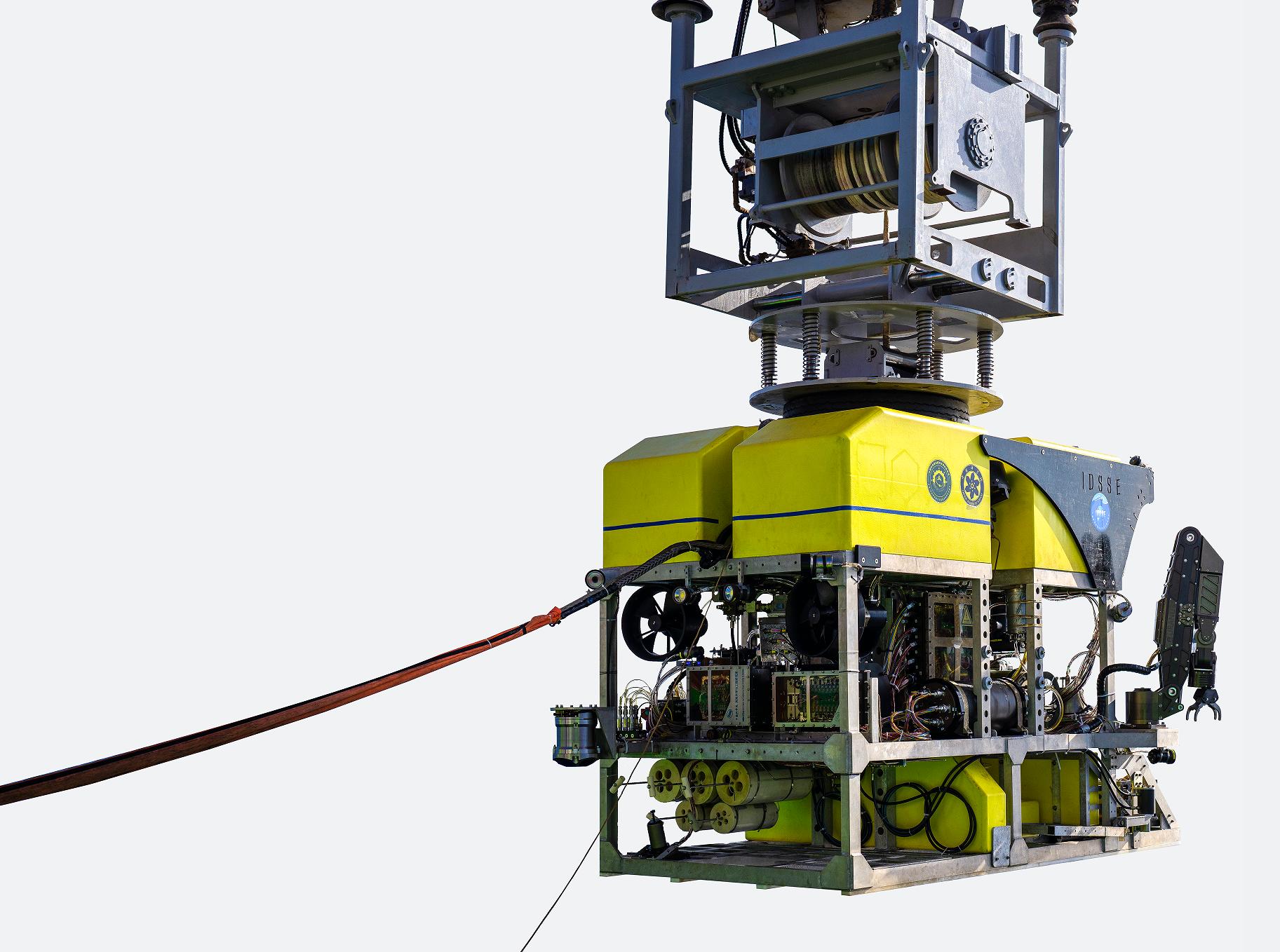
1、深海浮游式移动作业系统(rov)
深海浮游式移动作业系统,最大工作水深4500米,空气中重量4吨,有效载荷200kg,外形尺寸:3.36m×2.12m×2.35m(长×宽×高),具有2台250kgf的液压推进器和4台200kgf的电动推进器,具有2台7功能作业机械手,全臂展时持重能力91kg。深海浮游式移动作业系统是针对深海科考的实际需求,以科学考察为主要作业任务的通用平台。该平台结合目前常用的无人潜水器rov的技术特点,在深海复杂底质情况下根据作业任务的需求移动至目标作业点,并提供强大的支撑力和稳定的作业平台,可完成多样化的作业任务。平台具备丰富的电气、液压、通讯接口,方便搭载各种作业工具及模块,开展深海科学考察和工程作业等。
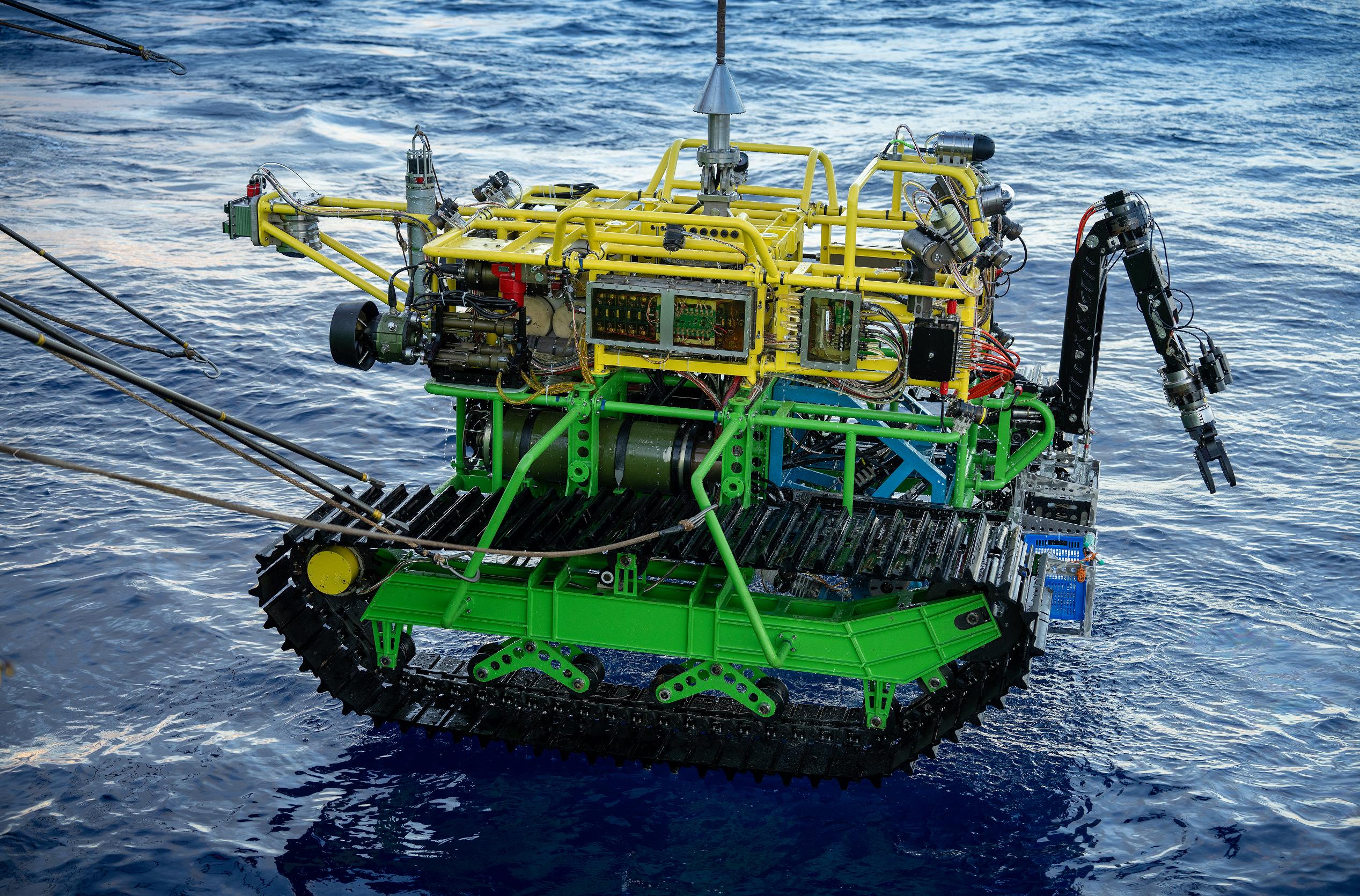
2、深海底爬行式移动作业系统
深海底爬行式移动作业系统,最大工作水深4500米,空气中重量3.7吨,水中重量2.3吨,外形尺寸:4.4m×3.5m×2.5m(长×宽×高),最大越障高度200mm,最大爬坡能力≥15°,行驶速度≥0.52m/s,装机容量80kw。深海底爬行式移动作业系统为海底重型作业任务设计,能够搭载岩石破碎头、钻机、链式切割、机械手等模块,完成海底行走、岩石破碎、挖沟和岩石样本采集等作业任务。平台主要采用钛合金、铝合金、塑料等轻质材料,系统具有丰富的电气接口、液压接口、机械接口,并搭载多种摄像机照明灯,能够实现多角度高清实时监控。平台采用大离去角和接近角履带行走机构和平衡悬挂结构,具有复杂地形的行走和越障能力。
3、深海分体式电视抓斗
深海分体式电视抓斗用于可视化抓取深海底岩石样品,最大工作水深6000米,空气中重量3.7吨,水中重量2.9吨,最大取样区域1.7m*1.2m,最大取样体积2.6m3,分体式设计使得装置电气篮和斗体解耦,保证抓斗能够在三级海况以内顺利进行海上作业。电视抓斗参加“探索一号”ts09航次,在马里亚纳海沟弧后张裂区域成功完成8个站位海底岩石可视化抓取,获取大量海底岩石样品,最大作业深度3535米。由于取样灵活,操作简单可靠,具备一定市场潜力,该分体式电视抓斗已完成成果转化。

4、深海工程地质原位测试装置
深海工程地质原位测试装置主要用于测量海底沉积物的力学参数,通过分析处理所获得的原始数据可以计算出作业海区的沉积物贯入阻力、侧壁摩擦力、孔隙水压力和剪切强度等工程地质参数,为海洋工程施工提供基础参数支撑,该装置于2019年8月完成南海海试验证。装置最大工作水深6000米,空气中重量3吨,水下重量2.7吨,其中最大静力触探推进力100kn,触探推进速度15~25mm/s可调,自主研发的系列数字化静力触探探头工作稳定可靠,传感数据已完成深海标定;剪切模块最大剪切深度1m,最大量程范围可达300kpa;装置还包括电气监控系统、液压系统和配套观通系统,配置多个传感器接口。

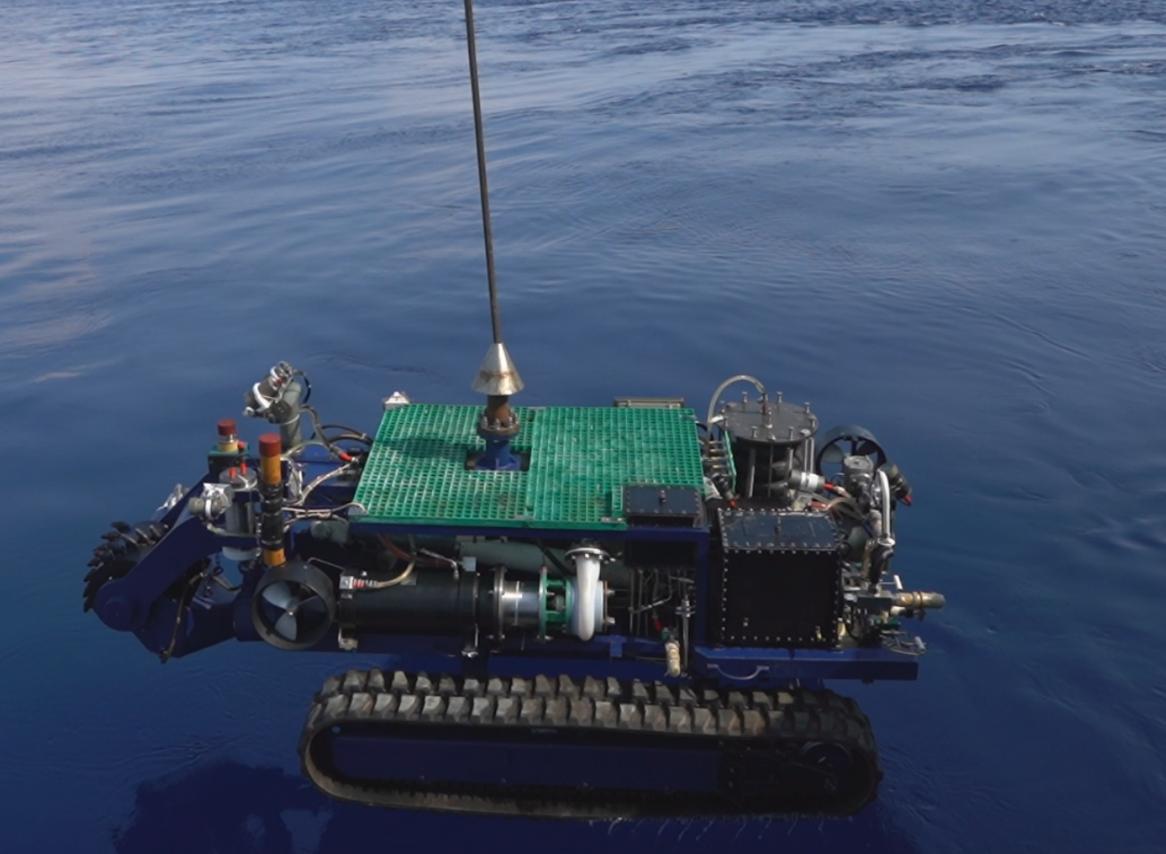
5、深海富钴结壳规模采样车
深海富钴结壳规模采样车设计深度4500m,装置长4.3m,宽2.3m,高1.6m,空气中重量4.1吨,水中重量3.0吨,装机容量80kw,每小时完成500kg富钴结壳矿物的剥离、破碎和收集。该装置于2018年4月在南海海域2500m水深开展了海上试验,并获取富钴结壳矿石样品,验证了深海富钴结壳采样装置的作业功能,包括布放回收时自动定向功能、海底行走功能、海底矿石破碎收集功能力,在极端复杂海底地形中具备作业能力。
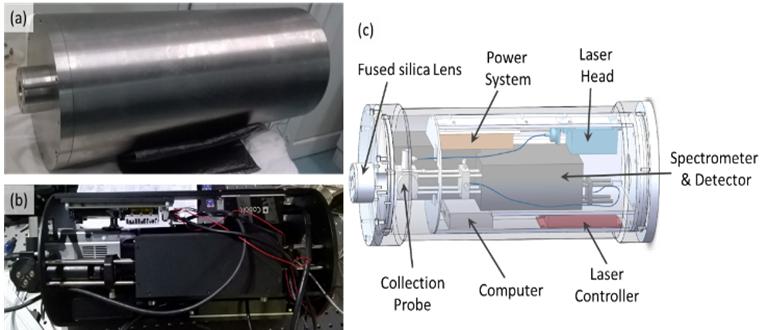
6、深海紫外激光拉曼光谱仪
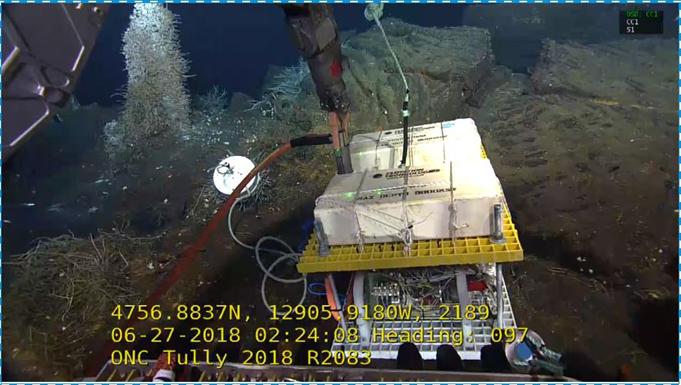
完成深海7449m海试,成为世界上工作深度最深的激光拉曼仪器,可在深海开展原位观测试验及研究。同时还研发出来全海深可用的可重复使用的充电锂电池,玻璃视窗的耐压及密封、拉曼光谱仪监控及分析软件、控制系统方面等技术成果。该仪器具备非常广阔的应用前景, 可用于深海矿物、深海化合物、深海生物方面开展原位试验研究。
另外还研发一套紫外激光拉曼光谱仪,于2018年6月27日在加拿大海底观测网(ocean networks canada, onc) endeavour节点成功联网运行。通过加拿大tully调查船和rov ropos将设备布放到一处低温热液口,开展长期低温热液口生物地球化学过程监测和原位实验。
7、深海通用元器件研发
在开发大型深海资源开发装备的同时,为解决许多深海常用元器件依赖进口,成本高,周期长等现象,自主研发多种深海常用的元器件,包括照明灯、闪光灯,模拟摄像机、网络摄像机、sdi摄像机、高清相机、云台、旋转编码器、磁控开关、锂电池池等,这些元器件安装在深海装备上,经过多次深海试验验证,完全可以取代国外进口装备,部分元器件的最大工作水深达到11000米。下图中是目前研发的多种深海通用元器件。

团队介绍
学科带头人简介

阳宁,正高级工程师、博士生导师
研究方向:水下系统技术与环境保护

casey, 正高级工程师,资深电气控制专家,曾任职于伍兹霍尔海洋研究所,上海交通大学,itg 国际电信集团(通用动力),通用动力核部门等单位
研究方向:电气控制

陈铭,工学硕士,2014年11月入职,正高级工程师,研究生导师
教育经历:1996年本科毕业于东华大学(原中国纺织大学)工业电气自动化专业,2009年硕士毕业于湖南大学控制工程专业
研究方向:电气自动化

杨阳,工学博士,2020年11月入职,研究员,传感器领域权威期刊ieee sensors journal副主编,曾任职于比利时飞利浦、日本大阪大学、美国西北太平洋国家实验室等科研机构
教育经历:
2009年本科毕业于中国地质大学(北京)电子信息工程专业;2010年硕士毕业于比利时鲁汶大学电子工程专业;2017年博士毕业于欧洲微电子研究中心暨比利时根特大学电子工程专业
研究方向:海洋传感器及柔性电子

陈为,工学硕士,2014年11月入职,高级工程师
教育经历:2006年本科毕业于清华大学电子工程系电子科学与技术专业,2009年硕士毕业于清华大学电子工程系电子科学与技术专业
研究方向:深海探测及装备技术

杨文才,工学硕士,2014年10月入职深海所,高级工程师
教育经历:2005年本科毕业于西安邮电大学电子信息工程专业,2009年硕士毕业于中国科学院研究生院,信号与信息系统专业
研究方向:电子信息技术

郑金荣,工学硕士,2015年7月入职,高级工程师
教育经历:2012年本科毕业于华中科技大学轮机工程专业 2015年硕士毕业于华中科技大学轮机工程专业
研究方向:深海资源开采装备自动控制技术

肖剑宇,工学硕士,2016年3月入职,工程师
教育经历:2014年本科毕业于哈尔滨工程大学/英国strathclyde大学船舶与海洋工程专业;2015年硕士毕业于英国strathclyde大学offshore floating system专业
研究方向:深海矿产资源开发系统总体方案设计研究及机械结构设计

谢超,工学博士,2015年4月入职,工程师
教育经历:2012年本科毕业于哈尔滨工程大学,机械设计制造及其自动化,2015年硕士毕业于哈尔滨工程大学机械制造及其自动化专业,2024年博士毕业于哈尔滨工程大学机械工程专业
研究方向:深海资源开发技术研究与装备、仪器研发
欧文,工学硕士,2015年12月入职,工程师
教育经历:2009年本科毕业于电子科技大学测控技术及仪器专业 2012年硕士毕业于电子科技大学测试计量技术及仪器专业。
研究方向:深海资源开采及装备技术

马浩翔,工学博士,2018年11月入职,工程师
教育经历:2009年本科毕业于黑龙江大学高分子材料与工程专业;2012年硕士毕业于黑龙江大学高分子化学与物理专业;2018年博士毕业于哈尔滨工业大学化学工程与技术专业
研究方向:深海资源开发装备技术及高性能工程材料研发

刘俊,工学硕士,2013年8月参加工作,工程师
教育经历:2010年本科毕业于武汉理工大学机械工程及自动化专业;2013年硕士毕业于重庆大学机械设计及理论专业
研究方向:深海资源开发装备机械工程及液压控制技术

谢家华,工学硕士,2019年1月入职,工程师
教育经历:2015年本科毕业于西北工业大学飞行器设计与工程专业, 2018年硕士毕业于浙江大学飞行器设计专业
研究方向:深海资源开采装备技术研发,动力学仿真,上位机软件开发

danny espinoza,计算机技术硕士,2023年2月入职,工程师。
教育经历:2015年本科毕业于universidad de las fuerzas armadas机械工程系机电工程专业,2020年硕士毕业于天津理工大学计算机科学与工程系计算机技术专业。
研究方向: 深海探测及软件和技术开发。

高怀宁,工学学士,2007年参加工作,工程师
教育经历:2007年本科毕业于西北工业大学飞行器设计与工程专业
研究方向:机械设计

洪泉,工学博士,2022年10月入职,工程师;
教育经历:2011年本科毕业于电子科技大学机械设计制造及其自动化专业,2014年硕士毕业于电子科技大学机械电子工程专业,2022年博士毕业于北京理工大学光机电微纳制造专业
研究方向:mems工艺及海洋传感器

汤世仁,工学学士,2022年12月入职,工程师
教育经历:2016年毕业于重庆交通大学机械电子工程
研究方向:深海探测及软件和技术开发,上位机软件开发

郭泽堃,工学博士,2024年7月入职,工程师
教育经历:2014年本科毕业于福建农林大学材料科学与工程专业;2016年硕士毕业于华南师范大学光学工程专业;2024年博士毕业于中山大学微电子学与固体电子学专业
研究方向:海洋微纳传感器、新型信息材料与器件

苑亚鹏,工学博士,2023年10月入职,工程师
教育经历:2015年本科毕业于大连海事大学轮机工程专业;2018年硕士毕业于大连海事大学轮机工程专业;2023年博士毕业于日本大阪大学生命机能技术专业
研究方向:深海微纳传感器技术研发

吴帝业,工学硕士,2023年7月入职,助理工程师。
教育经历:2020年本科毕业于中国地质大学(北京)测控技术与仪器专业;2023年硕士毕业于中国地质大学(北京)电子信息专业
研究方向:硬件电路设计、嵌入式程序开发、上位机软件开发

冷静,工学硕士,2021年8月入职,助理工程师
教育经历:2018年本科毕业于西南石油大学机械设计制造及自动化专业;2021年硕士毕业于中国科学院大学机械电子工程专业
研究方向:深海资源开采装备技术研发,上位机软件开发

吴学涵,工学学士,2022 年7月入职,助理工程师
教育经历:2022年本科毕业于江西理工大学机械工程专业
研究方向:深海机械设计

胡佳云,2017年11月入职,财务助理

冯千懿,2024年4月入职,科研助理
2021级研究生:邹阳,魏紫鸿(博士)
2022级研究生:朱海,张笑玮,戴主航(博士),张海(博士)
2023级研究生:毛尔杰(联合培养)、安烺迪(联合培养)
2024级研究生:齐培超(博士)
联系人:肖剑宇
联系电话:0898-88217399
z6尊龙app官方网站 copyright?中国科学院深海科学与工程研究所 备案证号:
地址: 三亚市鹿回头路28号 邮编:572000 网站维护:深海所办公室 邮箱: